Swift: Shared memory manager
Memory allows the computational process to keep track of its state to make progress, so memory working skills are crucial for programmers. But in today’s computing systems, where multiple threads of execution operate simultaneously, the complexity of working with memory takes on a new dimension.
When a correctly written program is executed in a single thread, its state changes sequentially according to the algorithm, and the result of the computation can be obtained from the state at completion. Even multiple concurrent (operating in parallel) threads, each running sequentially, as long as they do not communicate via shared memory, can safely obtain the desired results. But when different concurrent threads share memory, difficulties arise because the shared memory may be in an intermediate, incoherent state and when that undesirable situation occurs, the program may get the wrong result or even crash. In order to prevent this, we must use thread synchronization, i.e. to ensure that problematic shared memory objects can only be accessed exclusively by one thread at any given time (in fact, this requirement is imposed if at least one thread requires modification access). Thus, the memory state will always be observed by multiple threads in a coherent state.
In Swift, a commonly recommended way to achieve exclusive mutual memory access is to leverage Dispatch queues, implementing either the EREW (Exclusive Read, Exclusive Write) approach (based on serial queues) or CREW (Concurrent Read, Exclusive Write) approach (based on concurrent queues). Here are examples of both.
Apple’s documentation states:
Replacing your lock-based code with queues eliminates many of the penalties associated with locks and also simplifies your remaining code. Instead of using a lock to protect a shared resource, you can instead create a queue to serialize the tasks that access that resource. Queues do not impose the same penalties as locks. For example, queueing a task does not require trapping into the kernel to acquire a mutex.
However, when I benchmarked submitting a task closure to a queue on my macbook (3.1GHz Intel Core i7) I got an overhead of 200ns for a non-capturing task closure and 500ns for a capturing closure. Since today’s lock implementations don’t trap into the kernel for uncontended calls, the overhead of an uncontended lock operation is an order of magnitude lower, e.g., NSLock’s lock/unlock takes approx. 40ns. In most cases, the use of Dispatch queues is justified, but there’re still situations where we want to achieve the best possible performance, and then we have to seek different opportunities with lower-level synchronization primitives, such as NSLock or os_unfair_lock.
In this post, we will review the traditional state synchronization strategy with lock (aka mutex) and work out a more promising one. We will develop a concurrent construct for more organic synchronization of shared memory accesses. It will be interesting first of all for those who seek to write efficient parallel programs in Swift.
Mutexes
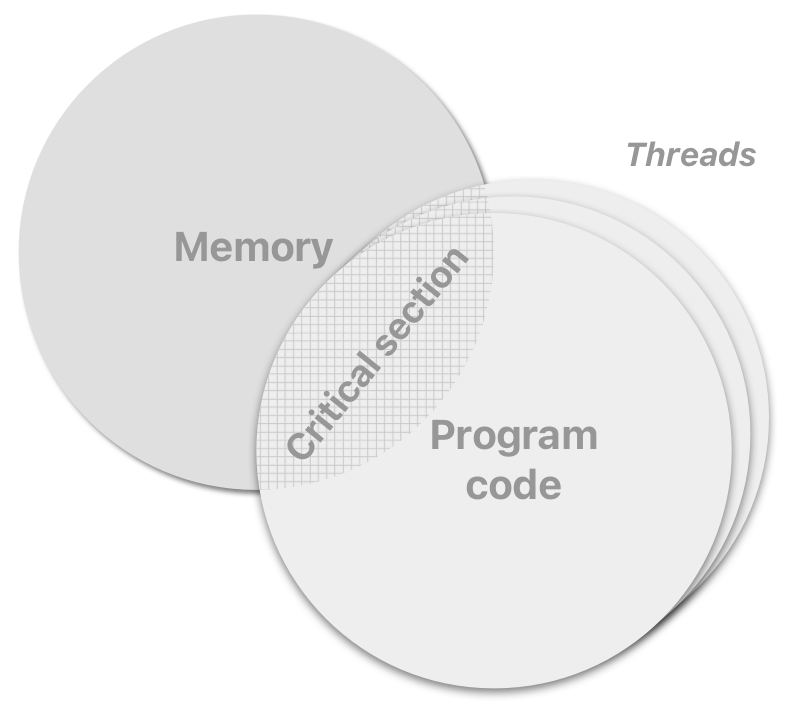
The intricacy of achieving exclusive mutual memory access by threads is there is no way to achieve this except indirectly, by controlling exclusive access to the program code regions that access shared memory, not memory itself. Such code regions are called critical sections. The undesirable situation when multiple threads fall into a critical section is called race conditions (or simply races).
The predominant way to prevent races in a critical section is to protect it with a program object called mutex (for mutual exclusion; also known as lock). Mutex provides a pair of methods acquire (alternatively lock) and release (alternatively unlock). Whenever one thread calls acquire, all attempts by other threads to call acquire cause them to wait (go to the sleeping state, or also block) until release is called. The thread that acquired the mutex is owner of the mutex, and it must release the mutex when it is done with the shared memory so that the other threads can access it. Since only one thread can be the owner of a mutex at a time, this assures mutual exclusion.
Example of usage:
mutex.lock()
// critical section begins
balance -= cost
// critical section ends
mutex.unlock()
Mutex-to-memory strategy
If we abstract away a bit and look at the program state as such, we can think of it as a set of some modeled program properties which are stored in memory (aka memory/concurrent objects; not to be confused with Swift properties). It’s crucial for the program’s correctness that its properties hold true (or be invariant) whenever they are meant to be used.
Properties can be expressed as primitive data types as well as composite data types. Operations on primitive data types can be atomic, and when this is the case, such data types cannot be caught off guard by other threads in an intermediate, incoherent state, and yet, in general, their such intrinsic safety is platform-dependent. Composite data types, on the other hand, are always vulnerable to being seen by other threads in an intermediate state. Therefore, we need to enclose concurrent code regions dealing with any data types in critical sections to make sure that the view of the program properties by other threads is always coherent.
The predominant basic principle is to methodically associate a particular mutex with a particular program property (a particular region of memory) that it protects. In practice, this means that all critical sections related to a particular property are protected by the property’s own mutex. The methodicality of the association (aka methodical locking) helps to ensure that the mutex-based synchronization is maintained correctly in an extending program. For the sake of simplicity, we will refer to it as mutex-to-memory strategy.
To make life easier for programmers, some languages (like Java or C#) offer built-in functionality of thread-safe classes (also known as monitors) to facilitate the synchronization of composite data types, which are essentially just syntactic sugar. For example, Java classes offer a special attribute synchronized for methods, which allows you to easily turn the method body into a critical section. Indeed, why not piggyback on the data abstraction that is already present in an object-oriented design, namely encapsulation, and additionally guarantee synchronized instance state? If program properties are based on thread-safe classes, this guarantees their invariance. Thread-safe classes can be customly implemented in Swift likewise.
Is mutex-to-memory strategy optimal?
Generally speaking, a program only makes sense when it is capable of progressing through transformations in its state. There either the user triggers a desired operation, or the program algorithm, relying on the program properties, performs certain computations and stepwise updates its state, and eventually the program transforms its state to some coherent, correct form. Basically, any program state transformation can be seen as one or more discrete steps between which the state is correct. Although correctness is always the most important factor when synchronizing shared memory accesses across multiple threads, efficiency should also be considered, because inefficient synchronization can easily cause a program with multiple threads to run slower than the same code executed in a single thread.
As a simple example, consider the following traffic accounting class that keeps track of the remaining money on the account (in balance) and the traffic consumed (in traffic), which constitute the program properties.
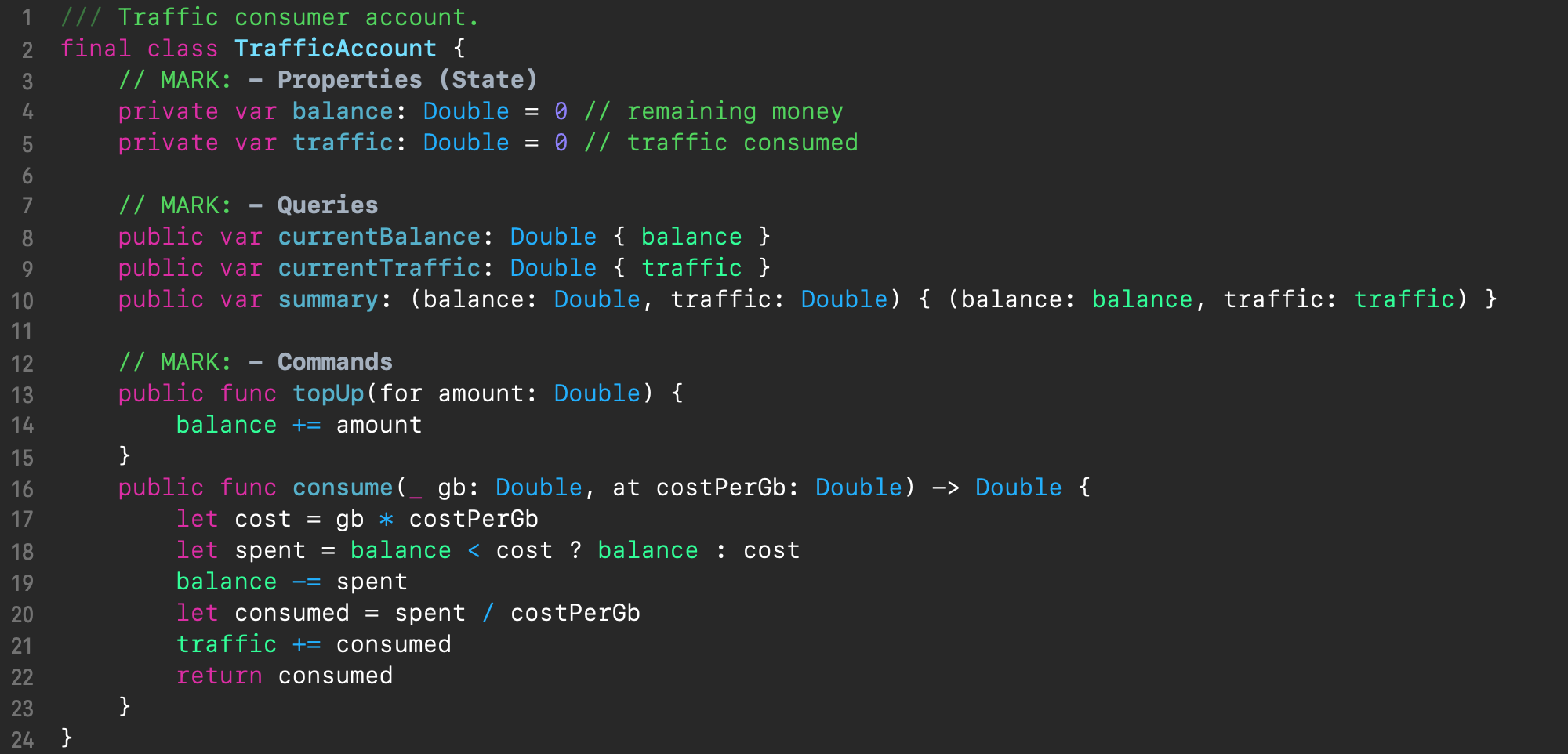
Its API is divided into 2 parts depending on the type of interaction with the state: queries and commands. The queries use read-only access, and in the above example these are the simple currentBalance and currentTraffic computed properties, each with read-only access to one property, and the composite property summary, which has read-only access to both of these properties. The latter is useful for combined reporting. The commands (which are also transactions) use read-write access, and in the above example these are the topUp(for:) and consume(:at:) methods for funding the account and deducting funds for consumed traffic, respectively. The latter, in addition to performing a side effect, also returns the actual amount of consumed traffic from the requested traffic.
The above code is fine when used in a single-threaded environment, but it’s not at all safe in a multi-threaded environment. So we have to synchronize the accesses:
- all read-write (state-modifying) accesses to the properties must be carefully synchronized
- since there is state modification, the read-only accesses to the properties must also be synchronized.
The most intuitive way to synchronize access to the properties is to apply mutex-to-memory strategy, i.e., to use a single mutex and simply enclose all the method bodies in lock/unlock calls. And that’s exactly what monitor syntactic sugar would actually do behind the scenes.
Now let’s take a closer look at the accesses used in the operations. In some of the operations, we only need to access one or the other property, but not both at once, and therefore locking the entire state for each operation is an overkill leading to performance degradation. Each of the state transformations with the mutex-to-memory strategy corresponds to one unified formula:
state′ = 𝐹(state)
This is a too coarse-grained formula since the semantics of our traffic account entity allows for more fine-grained transformations across the operations with different interdependencies between state chunks (program properties), such as:
state.x′ = 𝐹1(state.x)
state.y′ = 𝐹2(state.y)
z = 𝐹3(state.x, state.y)
Hence, the granularity of synchronization when using the mutex-to-memory strategy leaves much to be desired and we can try to find a better mutual exclusion strategy, other than mutex-to-memory, which allows for better granularity but does not disrupt the program store state logic.
Meet mutex-to-operation strategy
As seen in the previous section, synchronization based on the association of a particular mutex with a particular memory region is not always optimal. This is because the best strategy lives somewhere in another dimension. We want to dynamically operate on groups of memory objects on a per-operation basis. These memory objects are essentially the source properties and the destination properties of a program that are involved in state mutations. And for the time of a particular state-mutation operation, we want to preserve the properties from access by other parties – put another way, an operation should temporarily own or borrow (conventional terms) the properties for its exclusive use. This will allow us to achieve transaction processing.
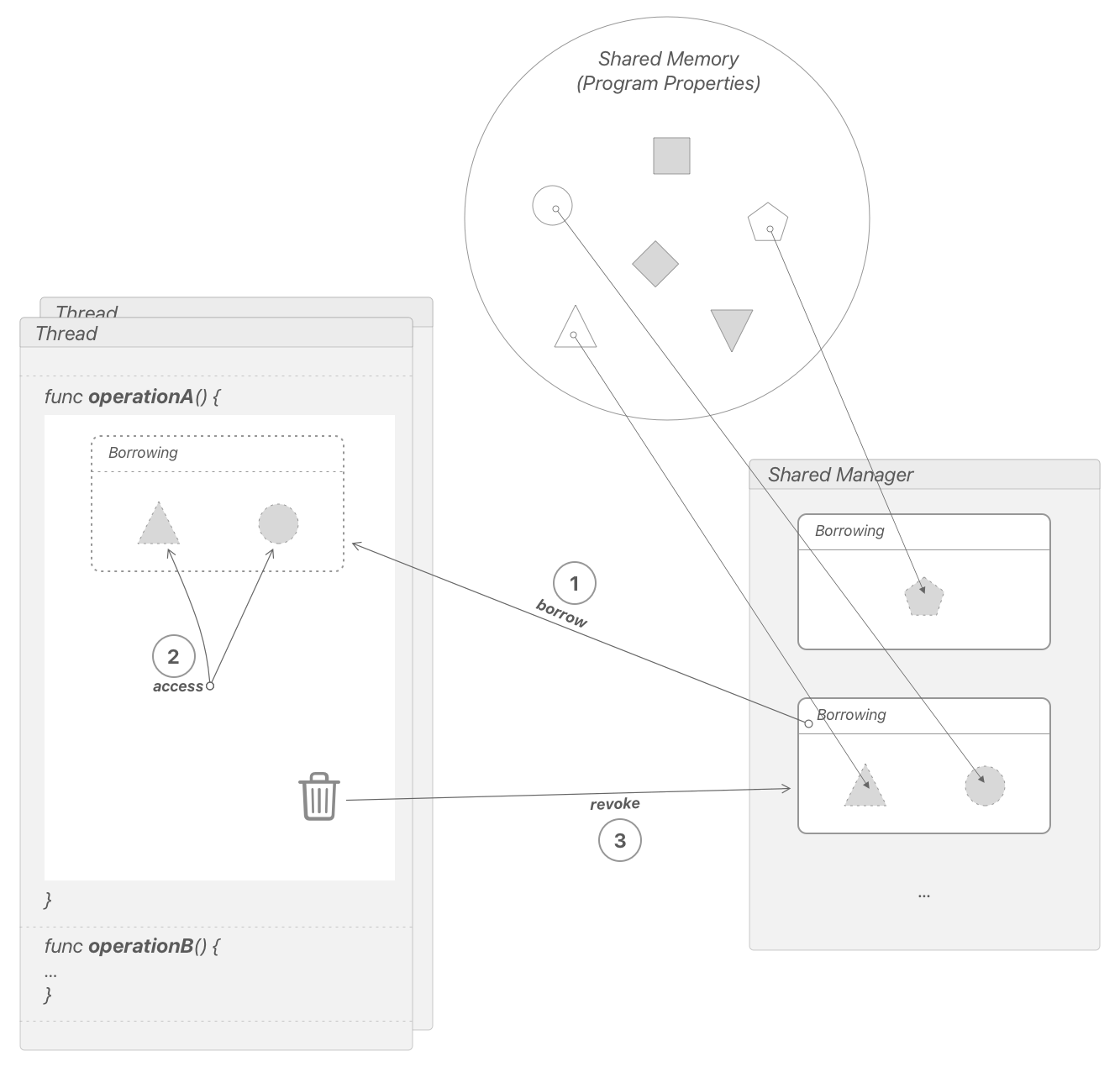
An abstraction of tracking access to property groups, which we will call Borrowing, becomes apparent. It’s illustrated in the figure below. When an operation is triggered in the thread, a new Borrowing instance with a group of borrowed properties is activated with Shared Manager. Shared Manager only activates the borrowing if that does not pose a shared property use conflict. To do this, Shared Manager checks for conflicts with already active borrowings, and if a conflict is detected, the original thread is blocked (put to sleep) until the blocking borrowing is revoked, after which the original thread is awakened back. The original thread tries to activate its borrowing with Shared Manager again and repeats this until it succeeds. Only then can the operation on the shared properties be safely performed, at the end of which the original thread revokes the operation’s borrowing.
This is an alternative thread synchronization approach, which we’ll call mutex-to-operation strategy.
The great advantage of this solution is that it, if implemented reentrantably, has the potential of composability, unlike, for example, monitor. This means that the programmer can build an app in a modular way, relying only on each component’s interface, without looking at its implementation. And internally, the thread safety of each component can rely on its own Shared Manager, which is hidden from the outside world behind the components interface. Different abstraction layers of a concurrent object can use their own Shared Manager.
Another noticeable advantage of mutex-to-operation strategy is that this solution is extremely scalable in the sense that it allows using a single instance of Shared Manager throughout the application, for example, as a singleton. Leveraging a single instance of Shared Manager breaks the circular wait deadlock condition because there’s always one active borrowing owned by an unblocked thread, which eventually revokes its borrowing at the end of the operation and makes way for other threads to proceed.
Implementation in Swift
We will develop a module that provides Shared Manager for a custom synchronization construct for mutex-to-operation strategy described, and we’ll start off with the API.
First, we need to somehow represent the property of the program so that we can refer to it from the code. To this end, we will have a generic class Property, parameterized by the type of property it represents. To note, the value of the property itself is not part of the API (not directly accessible by the client code). We’ll protect it by the internal access modifier (actually, it’s by default), which makes it inaccessible outside the module.
Another detail about shared program properties is that Shared Manager needs to distinguish them from each other without any introspection, i.e., they must have the quality of identity. Reference semantics of the class type will ensure this.

To provide access to program properties, we will have a special accessor to be supplied by Shared Manager for each given property in the access blocks (see below). In fact, it is a wrapper for the program property whose API is comprised of a single value property, which provides access to the property itself.
We will use the struct type for accessors because of its value semantics, which gives better opportunities for compiler optimization and the advantage of memory access exclusivity enforcement:

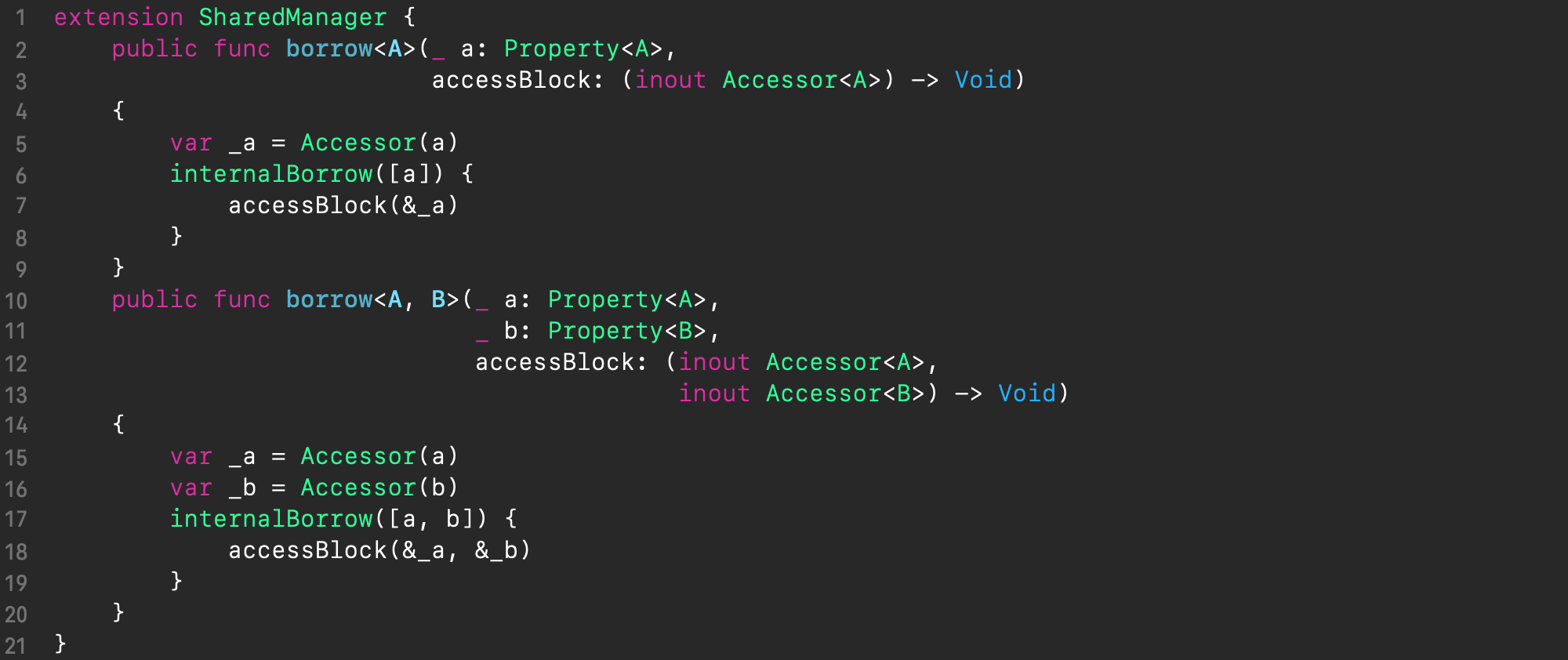
As the API for Shared Manager, we’ll have the concise higher-order functions borrow() (see the below code) whose arguments will be the desired program properties followed by a trailing closure of an access block. Access block will be called by the borrow() function either immediately if the properties are not in use, or, otherwise, right after they become available. The access block receives the accessors of the desired properties as arguments, which is the only way to access the values of the properties.
To be able to use an arbitrary number of desired properties, we will have the borrow() functions defined n times, with the number of property arguments growing from 1 to n, which are wrappers over the internalBorrow() method that performs the actual functionality. The code below illustrates this approach for n = 2. Notice how these wrapper methods forward their call to the internalBorrow() method with the properties passed in an array – in this way we achieve scalability.
Now that we’re done with the API of Shared Manager, let’s get down to implementing its internal logic.
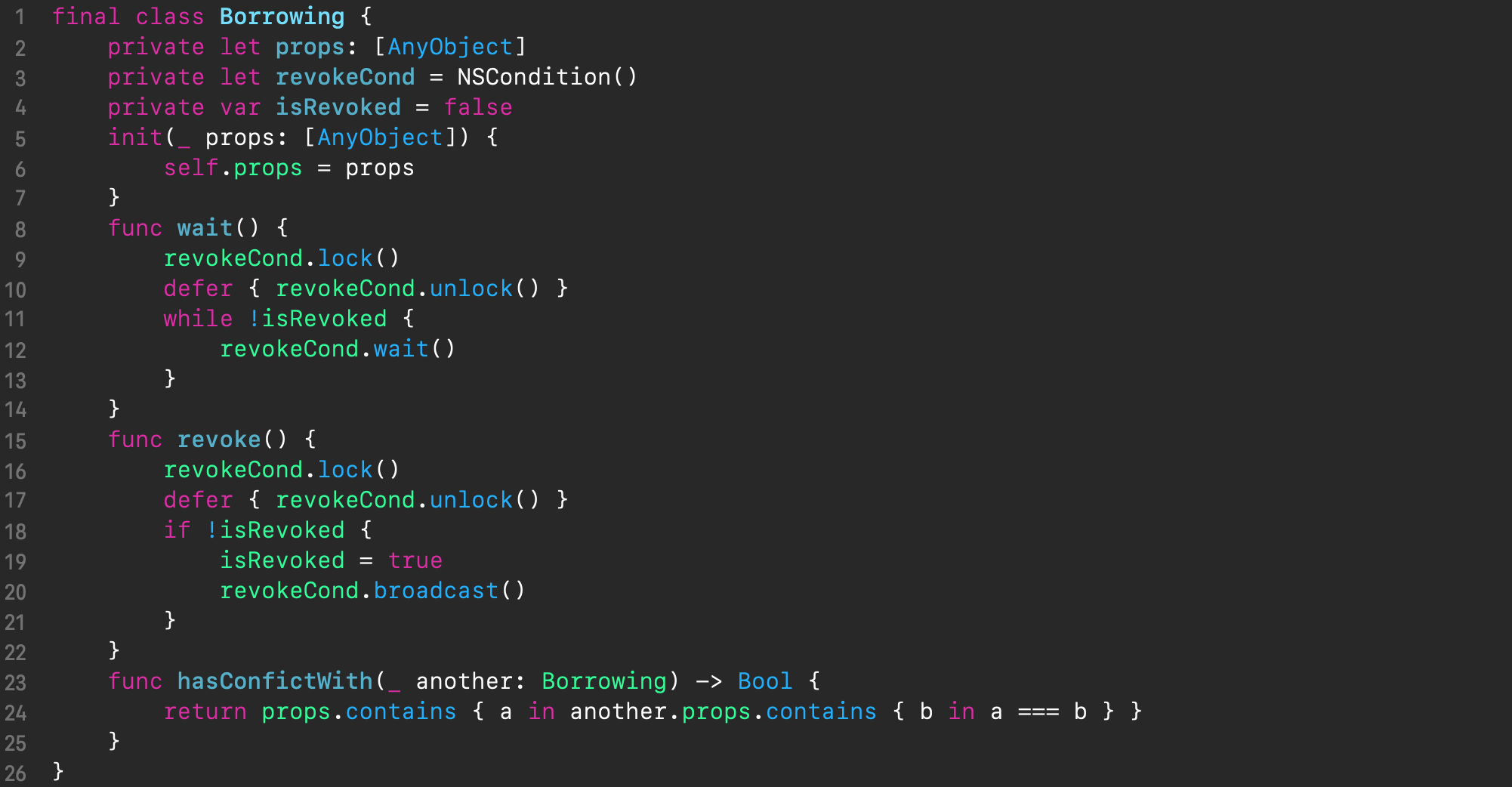
We’ll start with the Borrowing (see above) implementation, and below is the code of the Borrowing class. Instances of Borrowing are created on a per-operation basis. The props property contains a list of the borrowed properties and is used in the hasConflictWith method. As mentioned above, the only information Shared Manager uses internally about properties is their identity, which is exactly what the AnyObject type provides, which is used to reference the borrowed properties.
The lifetime of an instance of Borrowing matches that of the operation, so it’s the appropriate location for a mutex that will block conflicting threads either. As for the mutex itself, we need a bit different behavior – one that allows us to implement thread blocking that can be controlled from an unblocked thread. When an operation in one thread tries to borrow a property, while another operation in another thread owns that property, the former operation should be blocked until the latter finishes owning the conflicting property. The owning thread is responsible for unblocking waiting threads, if any, once the borrowing is complete.
The described behavior can be implemented using existing OS synchronization constructs – conditions. The code of the Borrowing class below fulfills such blocking. The wait() method contains the blocking part through which the threads enter the sleeping state and wait until the isRevoked flag is set. The unblocking part is in the revoke() method, and this is where the isRevoked flag is set. The isRevoked flag is accompanied by a special synchronization construct – the condition variable. The Borrowing instances have a single-use lifecycle.
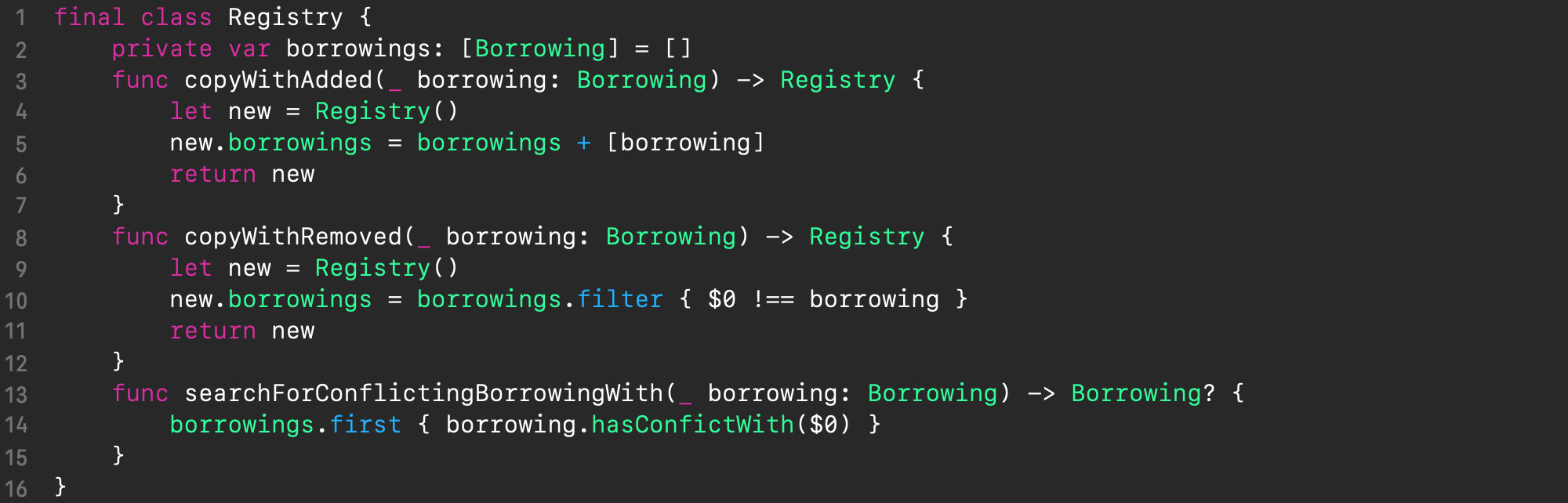
The Registry class is used for bookkeeping of all current borrowings and always reflects the current state of Shared Manager. An important aspect of its implementation is that any change in its state also causes a change of its idenity, which prevents ABA problem in handling Shared Manager state in a concurrent environment. Therefore, the API of Registry uses methods such as copyWithAdded() and copyWithRemoved() to assure this.
The searchForConflictingBorrowingWith() method searches for an active conflicting borrowing for a new one.
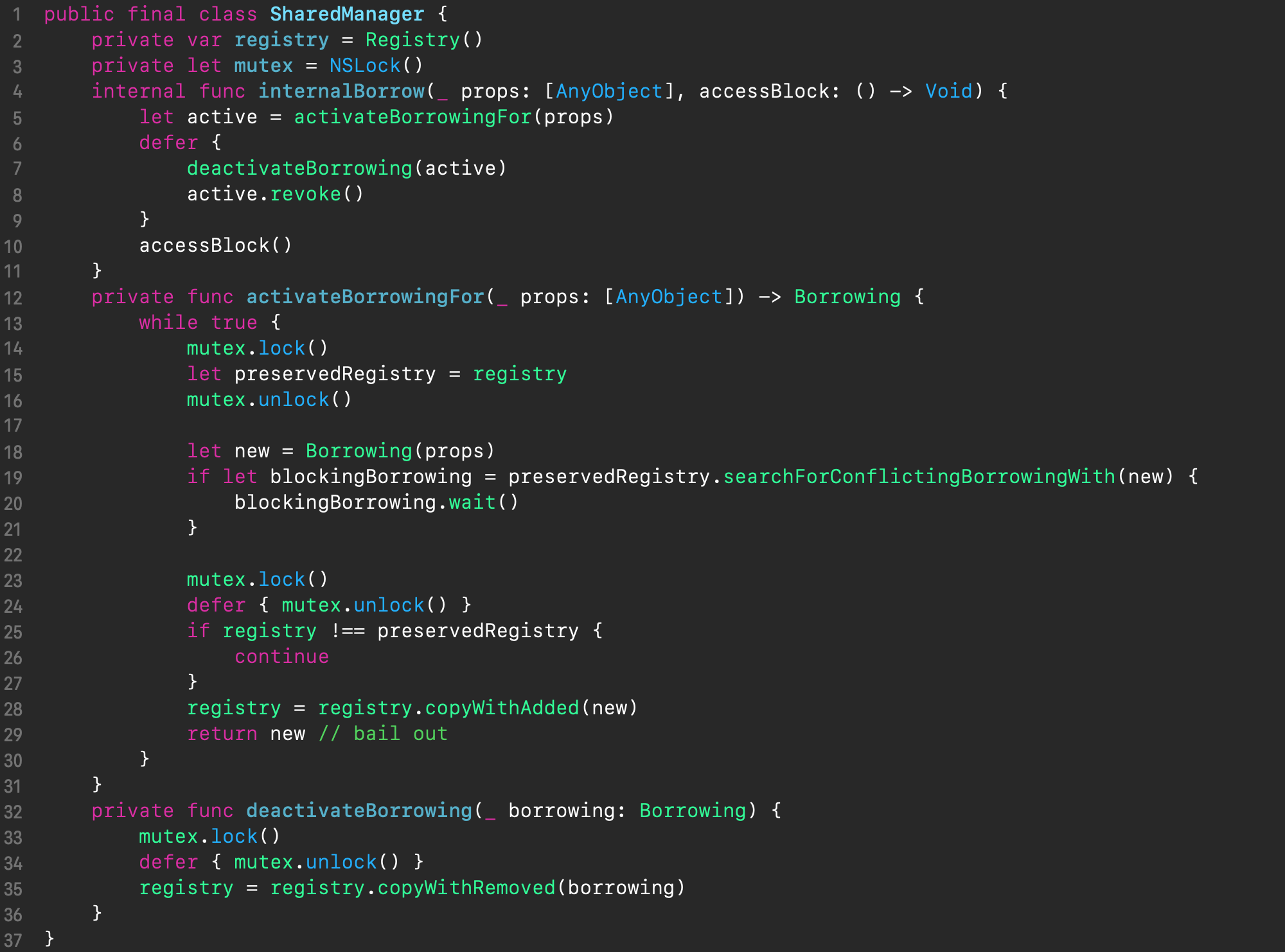
Shared Manager, implemented in the SharedManager class of the same name (see the below code), is the glue and at the same time the facade for all parties involved. Its API is a single internalBorrow() method which incorporates all the logic of our synchronization construct and occurs in 3 phases:
- creation and activation of a borrowing (via the helper method
activateBorrowingFor()) - execution of the passed access block (via the passed in closure
accessBlock) - and deactivation of the borrowing (via the helper method
deactivateBorrowing())
The method activateBorrowingFor() is quite complex, because it is responsible for maintaining the state of the entire construct (namely the borrowing registry) in a competitive environment. Its main complication is that we can’t lock the registry for the entire time the internalBorrow() method works, because in some code paths, which is when the borrowed property is already owned, the thread should go to sleep, and due to double locking it will end up deadlocked. Therefore, to avoid such a situation, we only temporarily block the access to the registry just to read it into a local variable (lines 14-16) on entry. Then we continue with the registry unblocked, and on exit we block it again (line 23-29) to commit the changes. That said, when exiting, we first check if the registry has been changed by another thread (line 25), and if so, the whole transaction must be repeated from the beginning. Otherwise, the synchronization logic is broken, which leads to race conditions. If the registry has not changed, then we save the new registry and exit the activateBorrowingFor() method. It is very important to have protection against ABA problem, because the newly borrowed properties can coincide with the other ones in the registry swapped by other threads running in parallel. (In terms of linearizability, we have implemented a nonblocking algorithm with line 25 being the linearization point)
Last but not the least, in the defer section in the method internalBorrow() (lines 7-8), in addition to and after deactivating the created borrowing, its revocation is necessarily performed to unblock the waiting threads, if any.
Example of usage
Finally, let’s see how we can apply the synchronization construct we developed for the mutex-to-operation strategy in our TrafficAccount class example above:
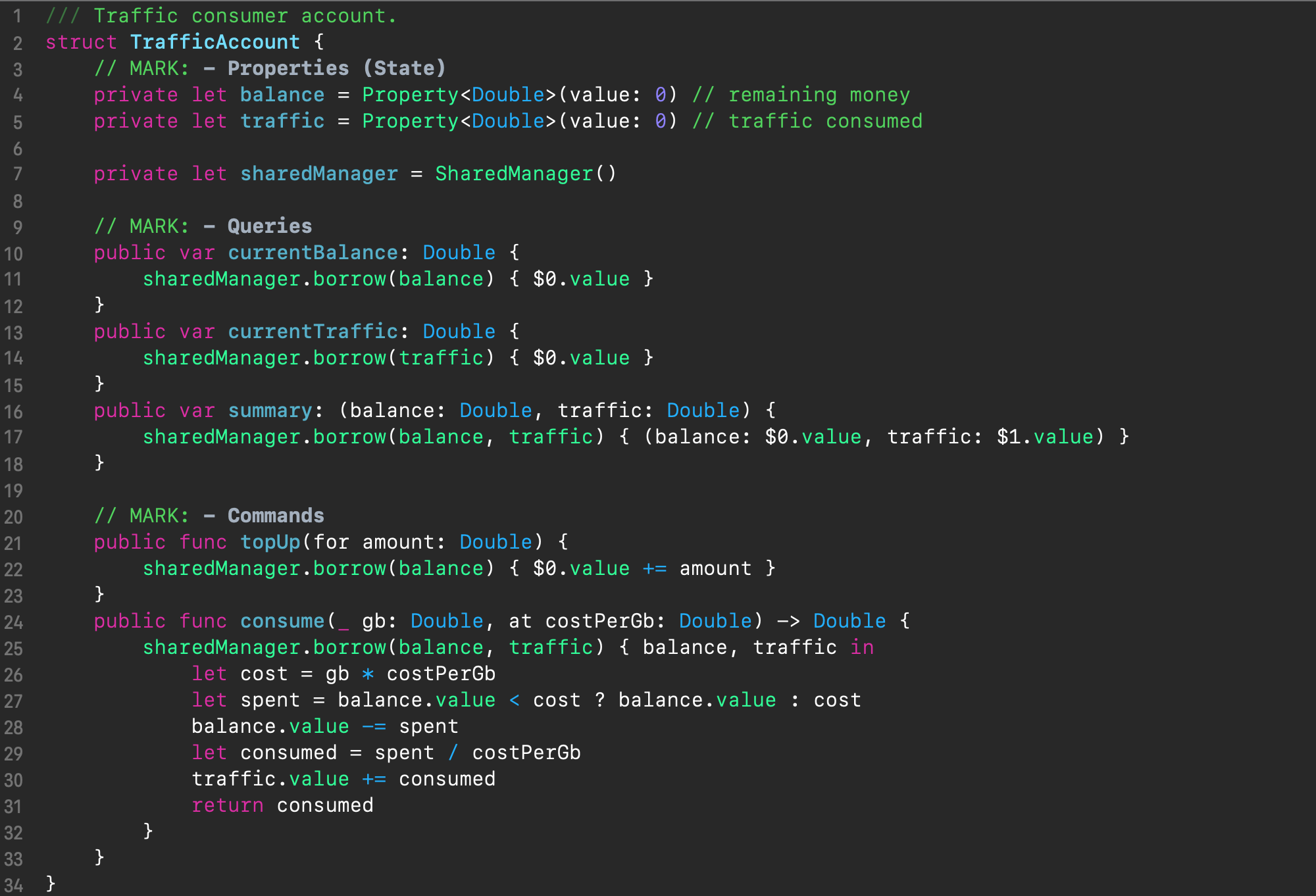
In fact, the code structure has not changed at all. Now the properties of balance and traffic are wrapped in the Property class (lines 4-5). We added the sharedManager property for the SharedManager instance (line 7). And we put the body of each operation in the access block of Shared Manager’s borrow() method argument, which follows the arguments of the properties used. Notice, how we refer to the property values inside the access block – they translate into closure’s arguments as accessors (Accessor struct instances), and we always use the value property of the accessor.
Conclusion
In this article, we saw that working with memory in multi-threaded programs is hard and that access to shared memory needs to be synchronized. Next, we saw that mutex is a universal synchronization mechanism, and we reviewed the predominant methodology for working with mutexes, which is to associate a particular mutex with a particular memory region(s). We referred to it as mutex-to-memory strategy. Next, using the example of a traffic accounting class, we saw how this methodology can be unoptimal and further we discussed how we can do better with an approach of associating a specific mutex with a specific operation, which we named mutex-to-operation strategy. Next, we developed a custom synchronization construct for mutex-to-operation strategy and applied it to our original traffic accounting example.
In fact, there is still room for improvement in our synchronization construct, such as a more optimal handling of the properties of a program by separating accesses by their type: read-only or read-write, but this is not covered in this post. If you are interested in the finished implementation, it is available in this repository.
Thank you for reading 🎈
Comments